Public Docs
【模型量化】深度学习模型量化 & 量化理论 & 各平台的量化过程 & 硬件加速
【TVM】TI关于TVM的使用测试与分析
【LLM&LVM】大模型开源工程思维导图
【北航卓越工程师】《汽车前沿技术导论:智能驾驶》讲义
【工具链】Yocto使用介绍——使用Yocto创建一个树莓派的系统镜像
【工具链】使用ssh+dialog指令设定服务器指定用户仅容器访问
【推理引擎】一篇关于模型推理的详细对比与学习
【推理引擎】关于TVM中的Schedule优化详解(On going)
【LLM微调】使用litgpt进行私有数据集模型微调的测试总结
【TVM】在TVM Relay中创建一个自定义操作符
【STT+LLM+TTS】如何使用语音转文字模型+大预言模型+语音生成模型完成一个类人的语音交互机器人
【RAG】 通过RAG构建垂直领域的LLM Agent的方法探索
【RAG】GraphRAG精读与测试(On going)
【AI Agent】MetaGPT精读与学习
【AI Base】Ilya Sutskever 27篇必读论文分享清单
【Nvidia】Jetson AGX Orin/ Jetson Orin nano 硬件测试调试内容(On going)
【BI/DI】LLM Using in BI Testing Scenario (On going)
【Nvidia】How to Activate a Camera on Nvidia Platform in Details
【RAS-PI】树莓派驱动开发
【行业咨询阅读】关注实时咨询和分析
【mobileye】2024 Driving AI
【mobileye】SDS_Safety_Architecture
【yolo】yolov8测试
【nvidia】Triton server实践
【alibaba】MNN(on updating)
【OpenAI】Triton(on updating)
【CAIS】关于Compound AI Systems的思考
【Nvidia】关于Cuda+Cudnn+TensorRT推理环境
【BEV】BEVDet在各个平台上的执行效率及优化(On Updating)
【Chip】AI在芯片设计和电路设计中的应用
【Chip】ChiPFormer
【Chip】关于布线的学习
【Chip】MaskPlace论文精读与工程复现优化
【gynasium】强化学习初体验
【Cadence】X AI
【transformer】MinGPT开源工程学习
【中间件】针对apollo 10.0中关于cyberRT性能优化的深度解读和思考
【Robotics】调研了解当前机器人开发者套件(on updating)
【Robotics】ROS CON China 2024 文档技术整理与感想总结(上2024.12.7,中2024.12.8,下场外产品)
【algorithm】关于模型、数据与标注规范的平衡问题
文档发布于【Feng's Docs】
-
+
首页
【Robotics】调研了解当前机器人开发者套件(on updating)
# 0. Introduction 如果想要开发一个机器人系统,传感器、控制器、执行器是电子系统中的核心,如果使用现成的开发者套件,能够有效降低研发周期和投入。 * 现成的套件能够解决传感器配置、传感器驱动、控制器底软、操作系统、工具链、执行器控制接口,算力方案等核心需要大量软硬件资源和经验去设计的问题; * 同时,合理的算力配置和硬件设计的pin2pin方案也能为未来的平台扩展提供更多帮助。 所以本着学习和参考的维度,尝试了解一些厂商提供的用于AMR场景的开发者平台。 # 1. Platforms ## 1.1. Nvidia Nova Orin Nova平台是nvidia的一个专用于AMR场景的开发者套件,平台以AGX ORIN为主控芯片,联合一系列传感器,构成了nova orin平台。平台在2022年末发布时共有三种版本: * 单orin版本没有safety * 单orin加基于激光雷达的PLC安全功能 * 双orin加基于视觉的安全功能(6个摄像头,2个双目+4个单目鱼眼,8个超声波探头+2IMU mems)  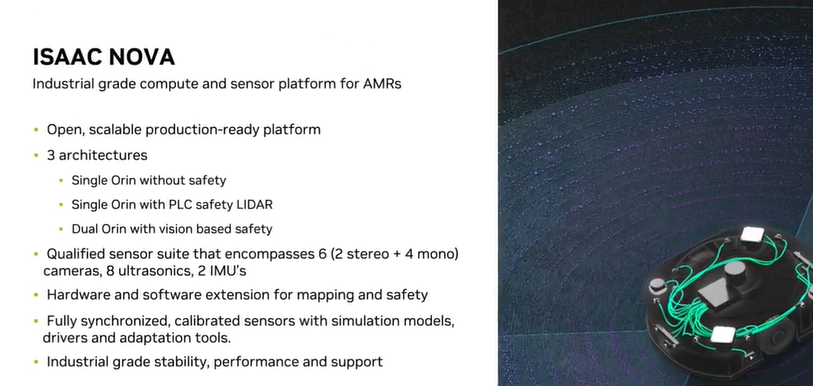 * 而在之后的版本,整个方案被升级到了(8摄像头,4个双目+4个单目鱼眼+禾赛pandarXT32激光雷达+2单线激光,单线激光目前在商用机器人室内场景中用于定位,效果较好) 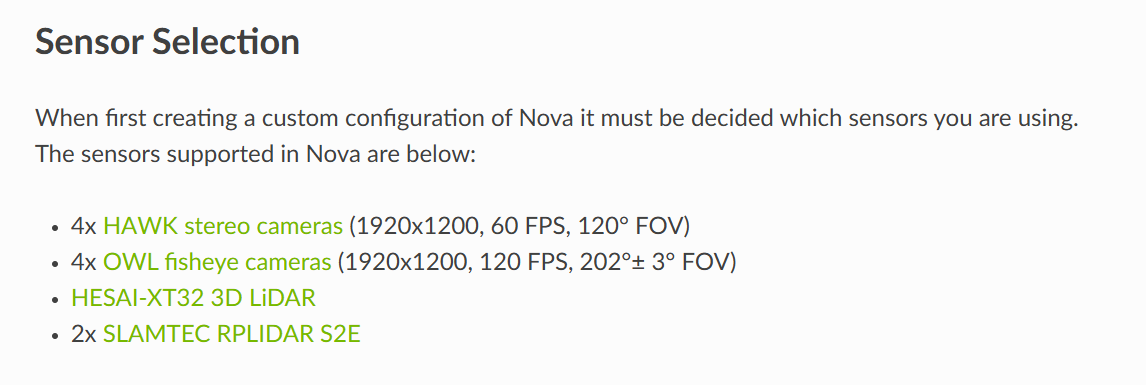 * 除了上面提到的官方版本,segway、nvidia、leopard联合打造平台,售价为5200美金。是一个单orin+3双目+3单目鱼眼的整体组合(https://leopardimaging.com/product/platform-partners/nvidia/nova-orin-development-kit/nova-developer-kit/) 。从六个相机来看,应该是驱动没有使用虚拟通道。agx orin多路复用最多支持16路相机,1080p的h264,h265p60的编解码也是最多能支持到9路(encode)和11路(decode)。    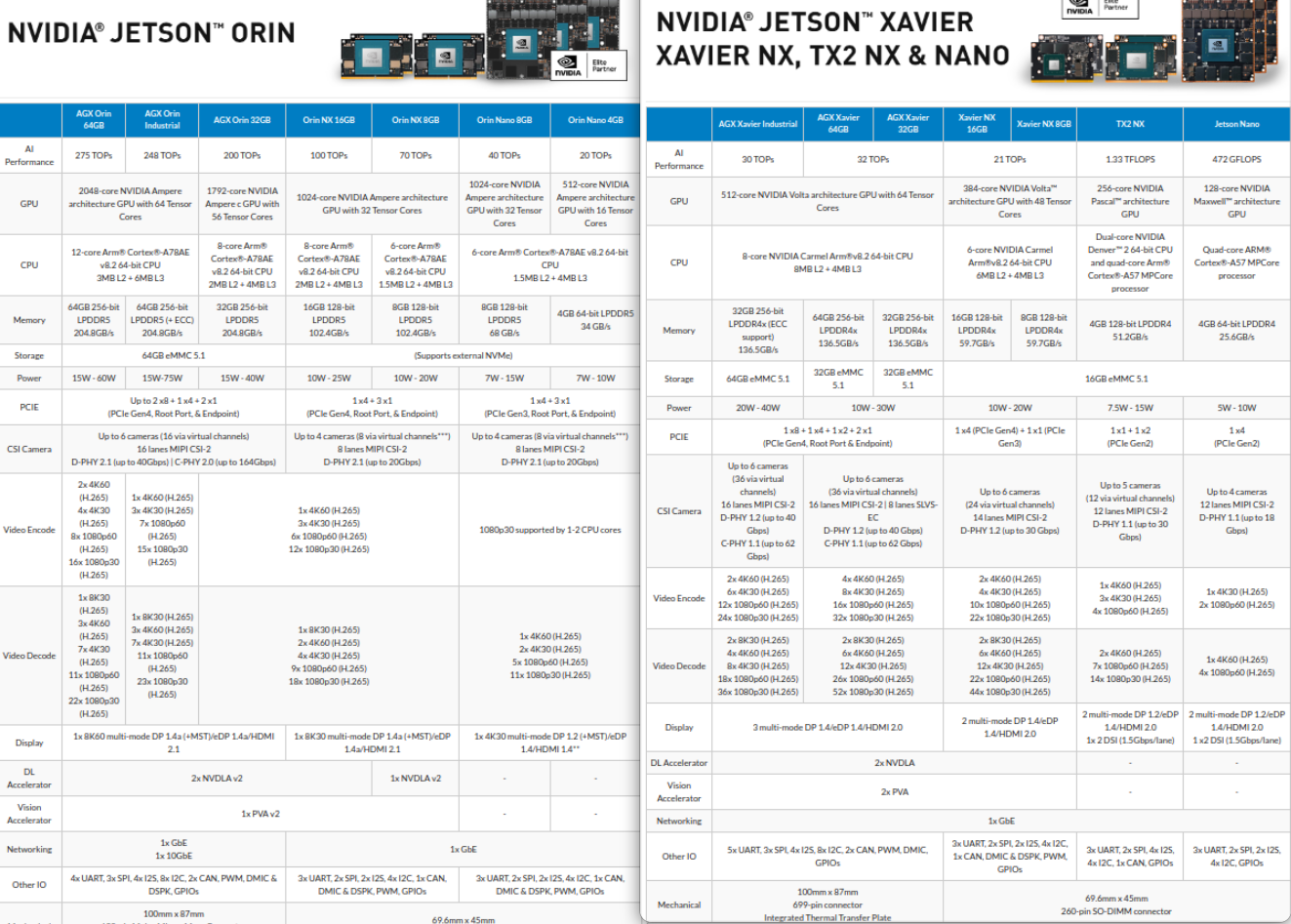 ## 1.2. 部分合作单位项目      参考资料: * https://nvidia-isaac-ros.github.io/nova/index.html * isaac perceptor:https://developer.nvidia.com/isaac/perceptor * NGC https://catalog.ngc.nvidia.com/orgs/nvidia/teams/isaac/resources/nova_orin * https://robotics.segway.com/nova-dev-kit/ * news:https://blogs.nvidia.com/blog/nvidia-isaac-nova-orin/ * issac: https://www.bilibili.com/video/BV1ZM4y1f7cQ/?spm_id_from=333.337.search-card.all.click&vd_source=c551ef751ac5907298e9c711d193f9cd * https://www.bilibili.com/video/BV11e411P7EK/?spm_id_from=333.337.search-card.all.click
dingfeng
2024年12月6日 14:11
89
0 条评论
转发文档
收藏文档
上一篇
下一篇
评论
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档
PDF文档(打印)
分享
链接
类型
密码
更新密码