Public Docs
【模型量化】深度学习模型量化 & 量化理论 & 各平台的量化过程 & 硬件加速
【TVM】TI关于TVM的使用测试与分析
【LLM&LVM】大模型开源工程思维导图
SmartSip
【北航卓越工程师】《汽车前沿技术导论:智能驾驶》讲义
【工具链】Yocto使用介绍——使用Yocto创建一个树莓派的系统镜像
【工具链】使用ssh+dialog指令设定服务器指定用户仅容器访问
【推理引擎】一篇关于模型推理的详细对比与学习
【推理引擎】关于TVM中的Schedule优化详解(On going)
【LLM微调】使用litgpt进行私有数据集模型微调的测试总结
【TVM】在TVM Relay中创建一个自定义操作符
【STT+LLM+TTS】如何使用语音转文字模型+大预言模型+语音生成模型完成一个类人的语音交互机器人
【RAG】 通过RAG构建垂直领域的LLM Agent的方法探索
【RAG】GraphRAG精读与测试(On going)
【AI Agent】MetaGPT精读与学习
【AI Base】Ilya Sutskever 27篇必读论文分享清单
【Nvidia】Jetson AGX Orin/ Jetson Orin nano 硬件测试调试内容(On going)
【BI/DI】LLM Using in BI Testing Scenario (On going)
【Nvidia】How to Activate a Camera on Nvidia Platform in Details
【RAS-PI】树莓派驱动开发
【行业咨询阅读】关注实时咨询和分析
【mobileye】2024 Driving AI
【mobileye】SDS_Safety_Architecture
【yolo】yolov8测试
【nvidia】Triton server实践
【alibaba】MNN(on updating)
【OpenAI】Triton(on updating)
【CAIS】关于Compound AI Systems的思考
【Nvidia】关于Cuda+Cudnn+TensorRT推理环境
【BEV】BEVDet在各个平台上的执行效率及优化(On Updating)
【Chip】AI在芯片设计和电路设计中的应用
【Chip】ChiPFormer
【Chip】关于布线的学习
【Chip】MaskPlace论文精读与工程复现优化
【gynasium】强化学习初体验
【Cadence】X AI
【transformer】MinGPT开源工程学习
【中间件】针对apollo 10.0中关于cyberRT性能优化的深度解读和思考
【Robotics】调研了解当前机器人开发者套件(on updating)
【Robotics】ROS CON China 2024 文档技术整理与感想总结(上2024.12.7,中2024.12.8,下场外产品)
【algorithm】关于模型、数据与标注规范的平衡问题
【nvidia】DLA的学习了解与使用
【nvidia】构建nvidia嵌入式平台的交叉编译环境(其他环境平台可借鉴)
【2025AI生成式大会】2025大会个人总结
【Robotics】 Create Quadruped Robot RL FootStep Training Environment In IsaacLab
【Robotics】如何一个人较为完整的完成一个机器人系统软件算法层面的设计与开发
【VLM】读懂多模态大模型评价指标
【VLM】大模型部署的端侧部署性能与精度评估方法与分析
【Nvidia】Jetson Orin 平台VLM部署方法与指标评测
【Database】向量数据库
【SoC】性能与功耗评估
【MCP】MCP探索
【InnoFrance】一个“关于声音”的有趣项目
【Robotics】写给那些想要快速了解机器人或者具身智能的工程师们
【Robotics】open X Embodiment RT-X 数据集下载与使用和分析
文档发布于【Feng's Docs】
-
+
首页
【Robotics】 Create Quadruped Robot RL FootStep Training Environment In IsaacLab
# 0. Breif This document is used to give a whole description about how a beginner of robotics can create a training environment of `Quadruped Robot` in isaaclab. The LLM and VLM models, like deepseek-v3, gpt-4o, etc. have been used to help me to search the useful documents and help me to understand the steps of each part. # 1. Introduction First it is important to know that nvidia gives us a whole toolchain to support the developers to create a `REAL2SIM2REAL` (which means create a sim environment with the real captured sensor data, and than training in the simulation environment, at last deploye the training model to the physical robot) environment to create out own robot. We need to understand the relationship about omniverse, isaacsim, isaacgym(deprecated), isaaclab, etc. * Containment Summary ``` NVIDIA Omniverse └── Isaac Sim ← is a simulator built using Omniverse tech └── used by Isaac Lab ← Isaac Lab wraps Isaac Sim (and Gym) for RL Isaac Gym (deprecated) ← standalone, not part of Omniverse └── used by Isaac Lab ← Isaac Lab can use Isaac Gym (optionally) ``` ``` mermaid graph TD Omniverse --> IsaacSim IsaacSim --> IsaacLab IsaacGym --> IsaacLab IsaacLab --> RL_Frameworks IsaacSim --> PhysX IsaacGym --> PhysX IsaacGym --> CUDA class Omniverse platform class IsaacSim module class IsaacLab wrapper class IsaacGym legacy class RL_Frameworks ext classDef platform fill:#F9F,stroke:#333,stroke-width:2; classDef module fill:#BBF,stroke:#333; classDef wrapper fill:#BFB,stroke:#333; classDef legacy fill:#FCC,stroke:#666,stroke-dasharray: 5 5; classDef ext fill:#EEE,stroke:#444; ``` ``` mermaid graph TD A[NVIDIA Omniverse] --> B[Isaac Sim] A --> C[Isaac Lab] C --> B C --> D[Isaac Gym] D --> E["Isaac Gym Preview Release - Deprecated"] B --> F[USD-based Simulation Engine] B --> G[PhysX / RTX / ROS2 Integration] D --> H[GPU-based Physics for RL] C --> I[RL + Robotics Benchmarking] C --> J[Interface Layer: Gym & Sim] class A omniverse class B isaac class C isaaclab class D isaacgym class E deprecated class F,G,H tech class I,J usecase classDef omniverse fill:#FFD700,stroke:#333,stroke-width:2; classDef isaac fill:#FFDD99,stroke:#333; classDef isaaclab fill:#FFB347,stroke:#333; classDef isaacgym fill:#FF9999,stroke:#333; classDef deprecated fill:#ccc,stroke:#666,stroke-dasharray: 5 5; classDef tech fill:#CDEFFF,stroke:#666; classDef usecase fill:#D0FFD0,stroke:#666; ``` A lot of works used isaacgym or the old version of isaaclab, which is not easy to understand the tutorial. What I want to do is to use the latest version of all things to create a good framework to demonstrate that I have understand how to make the quadruped robot walk. (The Feynman Study Method) # 2 Try the Isaaclab * Computer: GPU RTX4090 CPU 12th Gen Intel(R) Core(TM) i9-12900K MEM 128GB * ubuntu 24.04, nvidia driver 570.124.06, cuda 12.8 * python 3.10.16 * isaacsim 4.5, isaaclab 2.1 ( master branch) ## 2.1 Install IsaacSim, IsaacLab This link https://isaac-sim.github.io/IsaacLab/main/source/setup/installation/pip_installation.html#installing-isaac-lab (Annexe 3) is used to install isaaclab. It is really convinient and fluent. ### 2.2.1 Try IsaacSim #### 2.2.1.1 Prepare Omniverse * Install Omniverse Cache and launch it. Go to http://localhost:3080/ , which is used to optimise the data transformer.  * install nuleus server   * install nuleus navigater. This app helps your to navigate all the elements. If cannot connect the localhost server please check if some services stacked on http://localhost:3080/  #### 2.2.1.2 IsaacSim * Launch IsaacSim `./isaac-sim.sh` 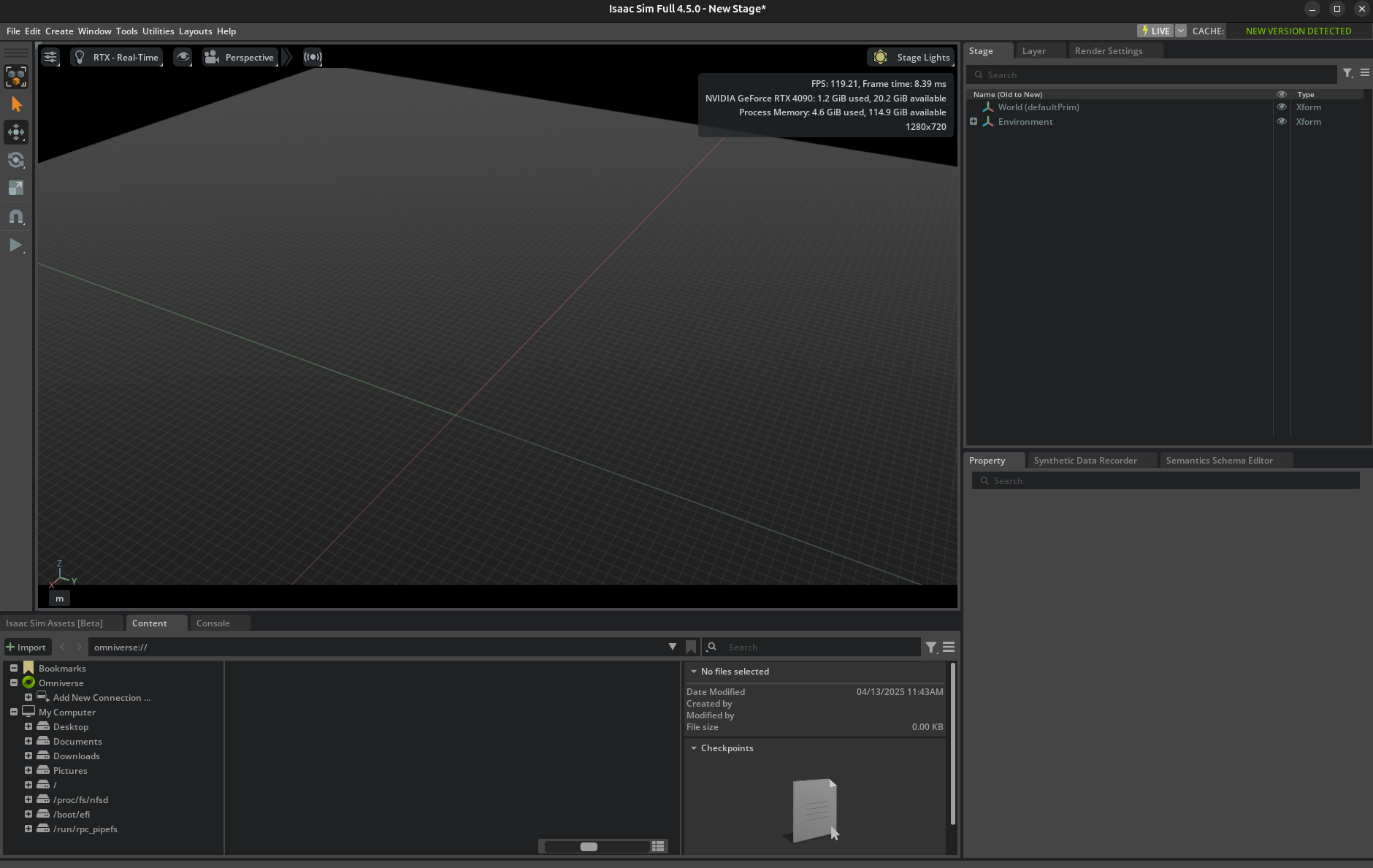 * Try Assets https://docs.isaacsim.omniverse.nvidia.com/latest/installation/install_faq.html#isaac-sim-setup-assets-content-pack 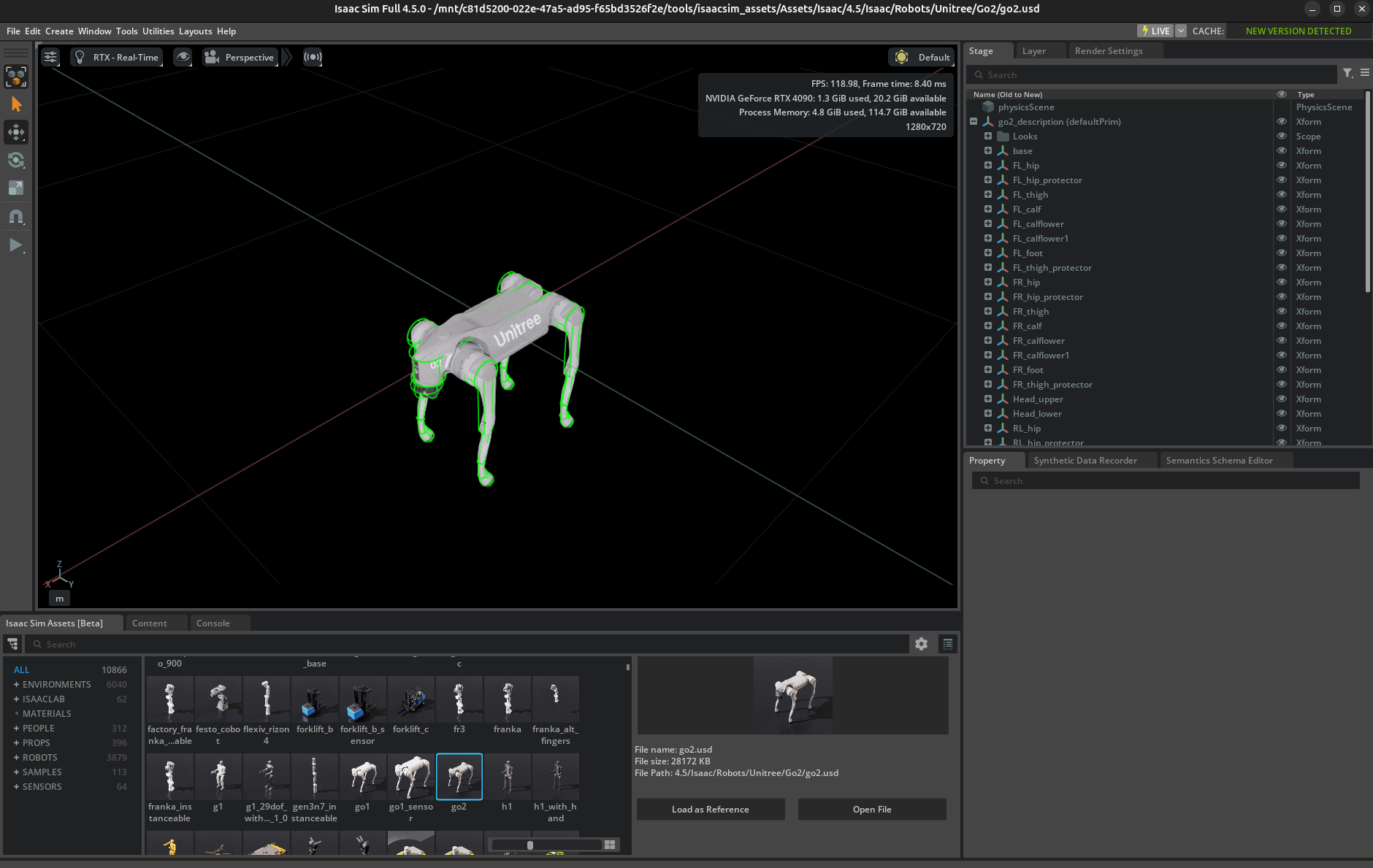 `There are three tabs for the tutorials, all three perform the same actions and reach the same outcome. Go through the full page under the same tab to learn about each workflow. Toggle between tabs to compare the different workflows.` * Quickstart with Isaac Sim https://docs.isaacsim.omniverse.nvidia.com/latest/introduction/quickstart_isaacsim.html * Quickstart with a Robot https://docs.isaacsim.omniverse.nvidia.com/latest/introduction/quickstart_isaacsim_robot.html * IsaacSim WebRTC * IsaaSim ROS * IsaacSim Foxglove ### 2.2.2 Try IsaacLab ## 2.2 To understand the training of robot See this video (Annexe 1), very clear! * Structure 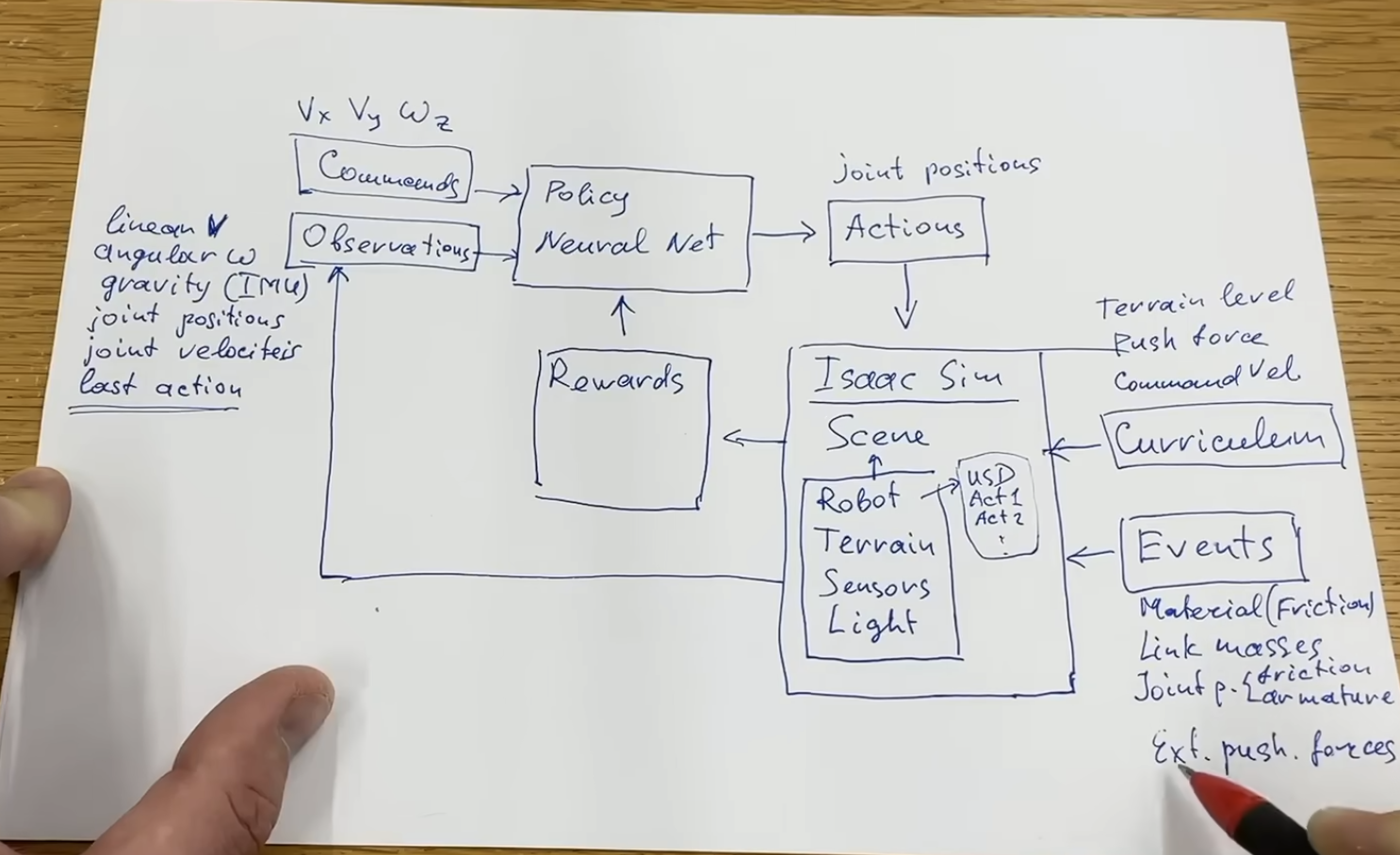 * Reward 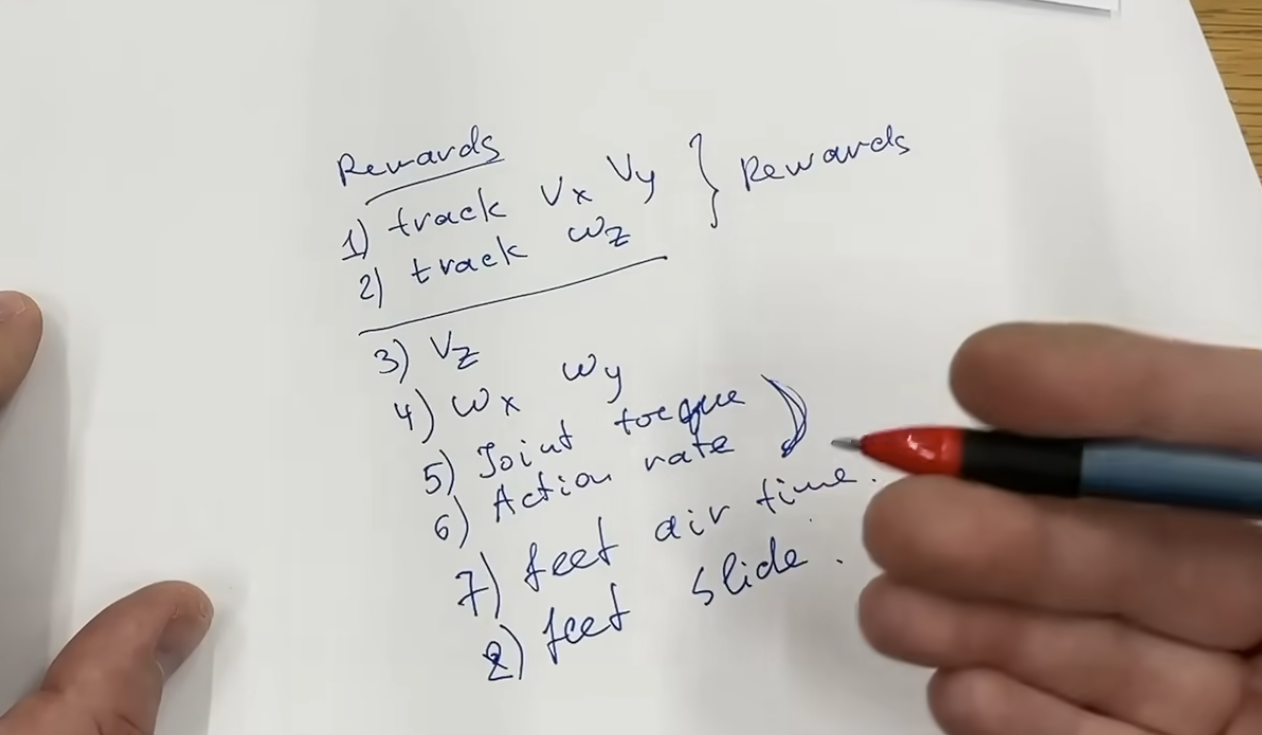 ### 2.2.1 Actuator, Joint, Motor * USD, URDF, and MJX (MJX-XML / MJXL) | Format | Full Name | Used By | Purpose | |---------------|----------------------------------|----------------------------------|-------------------------------------------------------------------------| | **USD** | Universal Scene Description | NVIDIA Omniverse, Isaac Sim | Rich, scalable 3D scene format for robotics, VFX, games | | **URDF** | Unified Robot Description Format | ROS (Robot Operating System) | XML format for describing robot geometry and kinematics | | **MJXL / MJX**| MuJoCo XML / MJX-XML | DeepMind’s MuJoCo | XML format for physics-based simulation of robots and environments | ``` +----------+ +------+ | URDF |----[converter]--->| USD | --> Isaac Sim, Omniverse +----------+ +------+ | |----[urdf2mjcf]---+ v | +--------+ | | MJX | <----------+ +--------+ (can also write MJX by hand for MuJoCo) ``` ### 2.2.2 RSL_RL ### 2.2.3 isaac_berkeley_humanoid ### 2.2.4 Quadruped Robot [【附件】rl-video-step-68000.mp4](/media/attachment/2025/04/rl-video-step-68000.mp4) [【附件】model_2900.pt](/media/attachment/2025/04/model_2900.pt) [【附件】rl-video-step-28000.mp4](/media/attachment/2025/04/rl-video-step-28000.mp4) [【附件】model_1000.pt](/media/attachment/2025/04/model_1000.pt) [【附件】rl-video-step-4000.mp4](/media/attachment/2025/04/rl-video-step-4000.mp4) [【附件】model_100.pt](/media/attachment/2025/04/model_100.pt) # Annexe * 1. https://www.youtube.com/watch?v=xwOaStX0mxE (a video about `How to build Humanoid: NVIDIA Isaac Lab, how to walk`) * 2. https://www.nvidia.com/gtc/?ncid=ref-inpa-172249 (Nvidia GTC about robotics) * 3. https://isaac-sim.github.io/IsaacLab/main/source/setup/installation/pip_installation.html#installing-isaac-lab (how to install isaaclab) * 4. https://github.com/HybridRobotics/isaac_berkeley_humanoid (a task that could be used in isaaclab of how to training and running a humanoid robot) * 5. https://docs.isaacsim.omniverse.nvidia.com/latest/installation/install_faq.html#isaac-sim-setup-assets-content-pack (isaacsim assets) * 6. https://www.myactuator.com/ (actuator helps to understand the parameters of actuator) * 7. https://www.youtube.com/@Skyentific (this teacher is great! Just follow him) * 8. https://www.bilibili.com/video/BV1mEmxYkEa3?spm_id_from=333.788.videopod.sections&vd_source=c551ef751ac5907298e9c711d193f9cd (Isaac Sim examples) * 9. https://www.bilibili.com/video/BV1rooaYVEk8/?spm_id_from=333.337.search-card.all.click&vd_source=94db5c5542d93967c5ec55fc3755b309
dingfeng
2025年5月30日 09:55
1518
0 条评论
转发文档
收藏文档
上一篇
下一篇
评论
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档
PDF文档(打印)
分享
链接
类型
密码
更新密码