Public Docs
【模型量化】深度学习模型量化 & 量化理论 & 各平台的量化过程 & 硬件加速
【TVM】TI关于TVM的使用测试与分析
【LLM&LVM】大模型开源工程思维导图
SmartSip
【北航卓越工程师】《汽车前沿技术导论:智能驾驶》讲义
【工具链】Yocto使用介绍——使用Yocto创建一个树莓派的系统镜像
【工具链】使用ssh+dialog指令设定服务器指定用户仅容器访问
【推理引擎】一篇关于模型推理的详细对比与学习
【推理引擎】关于TVM中的Schedule优化详解(On going)
【LLM微调】使用litgpt进行私有数据集模型微调的测试总结
【TVM】在TVM Relay中创建一个自定义操作符
【STT+LLM+TTS】如何使用语音转文字模型+大预言模型+语音生成模型完成一个类人的语音交互机器人
【RAG】 通过RAG构建垂直领域的LLM Agent的方法探索
【RAG】GraphRAG精读与测试(On going)
【AI Agent】MetaGPT精读与学习
【AI Base】Ilya Sutskever 27篇必读论文分享清单
【Nvidia】Jetson AGX Orin/ Jetson Orin nano 硬件测试调试内容(On going)
【BI/DI】LLM Using in BI Testing Scenario (On going)
【Nvidia】How to Activate a Camera on Nvidia Platform in Details
【RAS-PI】树莓派驱动开发
【行业咨询阅读】关注实时咨询和分析
【mobileye】2024 Driving AI
【mobileye】SDS_Safety_Architecture
【yolo】yolov8测试
【nvidia】Triton server实践
【alibaba】MNN(on updating)
【OpenAI】Triton(on updating)
【CAIS】关于Compound AI Systems的思考
【Nvidia】关于Cuda+Cudnn+TensorRT推理环境
【BEV】BEVDet在各个平台上的执行效率及优化(On Updating)
【Chip】AI在芯片设计和电路设计中的应用
【Chip】ChiPFormer
【Chip】关于布线的学习
【Chip】MaskPlace论文精读与工程复现优化
【gynasium】强化学习初体验
【Cadence】X AI
【transformer】MinGPT开源工程学习
【中间件】针对apollo 10.0中关于cyberRT性能优化的深度解读和思考
【Robotics】调研了解当前机器人开发者套件(on updating)
【Robotics】ROS CON China 2024 文档技术整理与感想总结(上2024.12.7,中2024.12.8,下场外产品)
【algorithm】关于模型、数据与标注规范的平衡问题
【nvidia】DLA的学习了解与使用
【nvidia】构建nvidia嵌入式平台的交叉编译环境(其他环境平台可借鉴)
【2025AI生成式大会】2025大会个人总结
【Robotics】 Create Quadruped Robot RL FootStep Training Environment In IsaacLab
【Robotics】如何一个人较为完整的完成一个机器人系统软件算法层面的设计与开发
【VLM】读懂多模态大模型评价指标
【VLM】大模型部署的端侧部署性能与精度评估方法与分析
【Nvidia】Jetson Orin 平台VLM部署方法与指标评测
【Database】向量数据库
【SoC】性能与功耗评估
【MCP】MCP探索
【InnoFrance】一个“关于声音”的有趣项目
【Robotics】写给那些想要快速了解机器人或者具身智能的工程师们
【Robotics】open X Embodiment RT-X 数据集下载与使用和分析
文档发布于【Feng's Docs】
-
+
首页
【Robotics】调研了解当前机器人开发者套件(on updating)
# 0. Introduction 如果想要开发一个机器人系统,传感器、控制器、执行器是电子系统中的核心,如果使用现成的开发者套件,能够有效降低研发周期和投入。 * 现成的套件能够解决传感器配置、传感器驱动、控制器底软、操作系统、工具链、执行器控制接口,算力方案等核心需要大量软硬件资源和经验去设计的问题; * 同时,合理的算力配置和硬件设计的pin2pin方案也能为未来的平台扩展提供更多帮助。 所以本着学习和参考的维度,尝试了解一些厂商提供的用于AMR场景的开发者平台。 # 1. Platforms ## 1.1. Nvidia Nova Orin Nova平台是nvidia的一个专用于AMR场景的开发者套件,平台以AGX ORIN为主控芯片,联合一系列传感器,构成了nova orin平台。平台在2022年末发布时共有三种版本: * 单orin版本没有safety * 单orin加基于激光雷达的PLC安全功能 * 双orin加基于视觉的安全功能(6个摄像头,2个双目+4个单目鱼眼,8个超声波探头+2IMU mems)  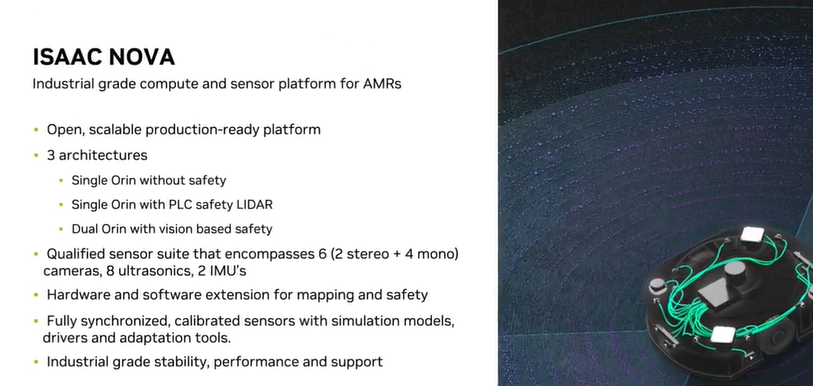 * 而在之后的版本,整个方案被升级到了(8摄像头,4个双目+4个单目鱼眼+禾赛pandarXT32激光雷达+2单线激光,单线激光目前在商用机器人室内场景中用于定位,效果较好) 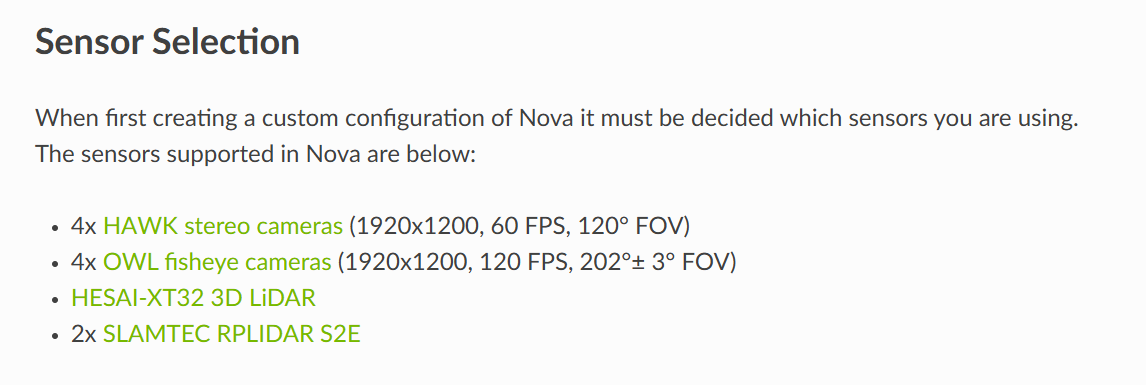 * 除了上面提到的官方版本,segway、nvidia、leopard联合打造平台,售价为5200美金。是一个单orin+3双目+3单目鱼眼的整体组合(https://leopardimaging.com/product/platform-partners/nvidia/nova-orin-development-kit/nova-developer-kit/) 。从六个相机来看,应该是驱动没有使用虚拟通道。agx orin多路复用最多支持16路相机,1080p的h264,h265p60的编解码也是最多能支持到9路(encode)和11路(decode)。    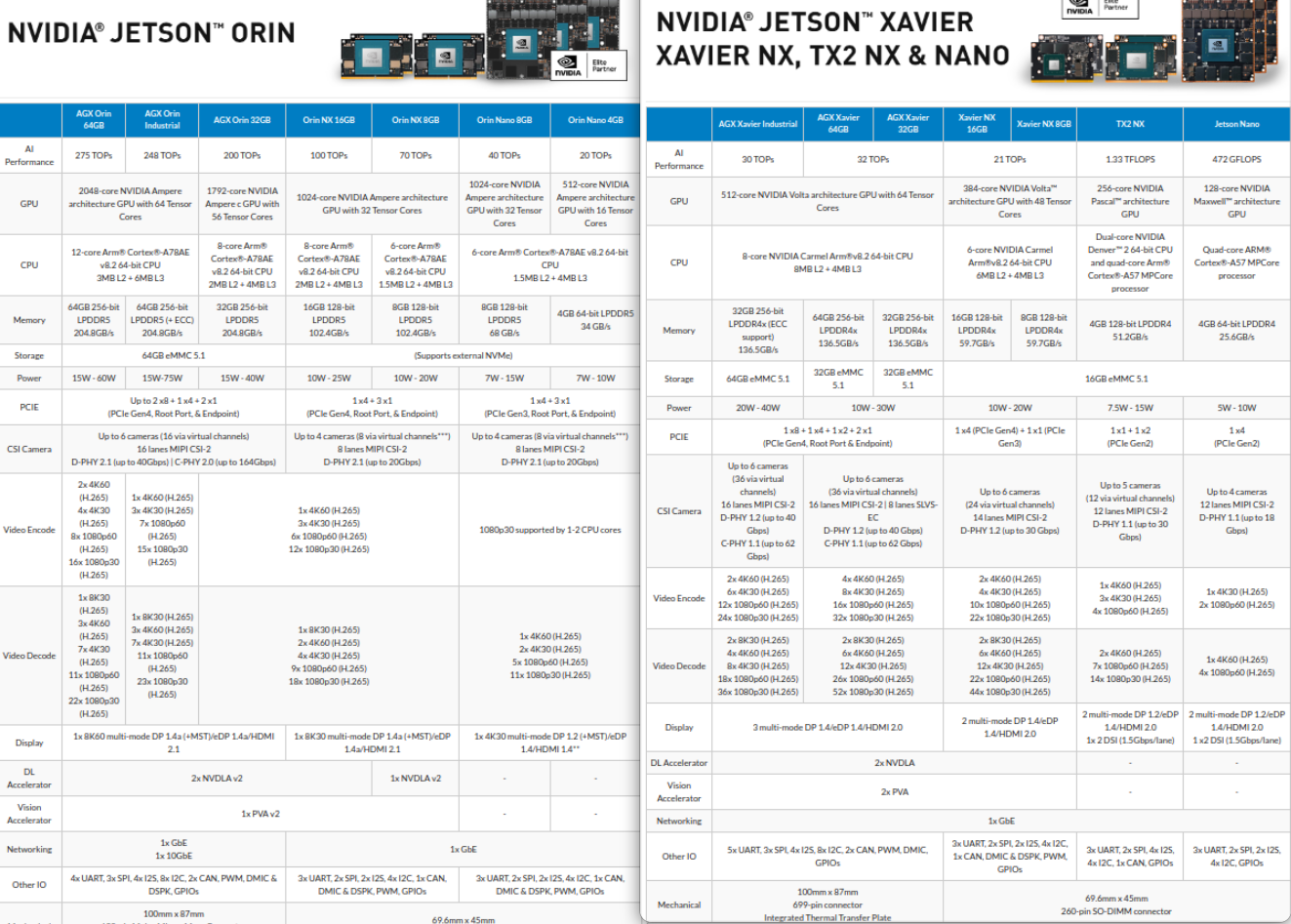 ## 1.2. 部分合作单位项目      参考资料: * https://nvidia-isaac-ros.github.io/nova/index.html * isaac perceptor:https://developer.nvidia.com/isaac/perceptor * NGC https://catalog.ngc.nvidia.com/orgs/nvidia/teams/isaac/resources/nova_orin * https://robotics.segway.com/nova-dev-kit/ * news:https://blogs.nvidia.com/blog/nvidia-isaac-nova-orin/ * issac: https://www.bilibili.com/video/BV1ZM4y1f7cQ/?spm_id_from=333.337.search-card.all.click&vd_source=c551ef751ac5907298e9c711d193f9cd * https://www.bilibili.com/video/BV11e411P7EK/?spm_id_from=333.337.search-card.all.click
dingfeng
2024年12月6日 14:11
768
0 条评论
转发文档
收藏文档
上一篇
下一篇
评论
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档
PDF文档(打印)
分享
链接
类型
密码
更新密码